



Next: B.2 Least Squares Approximation
Up: B. Mathematical Goodies
Previous: B. Mathematical Goodies
B.1 Euler's Rotation Theorem
According to Euler's rotation theorem [133], any rotation can be
described using three rotation angles. If the rotations are written in terms of
rotation matrices
 ,
,
 , and
, and
 , then a general
rotation
, then a general
rotation
 can be written as
can be written as
 |
(B.1) |
The three angles
 giving the three rotation matrices are
called Euler angles.
There are several conventions of Euler angles, depending on the axes around
which the rotations are carried out. The so-called
giving the three rotation matrices are
called Euler angles.
There are several conventions of Euler angles, depending on the axes around
which the rotations are carried out. The so-called  -convention, see
Figure B.1, is the
most common definition. In this convention the rotation is given by Euler angles
, where the first rotation is by an angle
-convention, see
Figure B.1, is the
most common definition. In this convention the rotation is given by Euler angles
, where the first rotation is by an angle  around the
around the
 -axis, the second is by an angle
-axis, the second is by an angle
![$ \theta \in [0,\pi]$](img602.png) around the
-axis,
and the third is by an angle
around the
-axis,
and the third is by an angle  around the
-axis (again).
around the
-axis (again).
Figure B.1:
Definition of Euler angles
in the so-called
-convention rotation scheme according to the rotation components given in
Equation (B.2), picture adapted from [133].
|
|
In
-convention the component rotations are given by
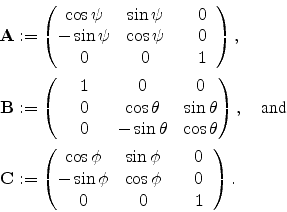 |
(B.2) |
Hence the general
 rotation matrix
is given by
rotation matrix
is given by
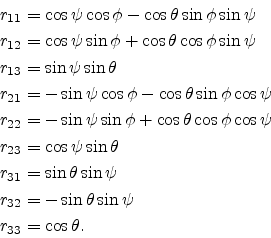 |
(B.3) |
Next: B.2 Least Squares Approximation
Up: B. Mathematical Goodies
Previous: B. Mathematical Goodies
Wilfried Wessner: Mesh Refinement Techniques for TCAD Tools
![\includegraphics[width=0.8\columnwidth]{pics/NewAngle.eps}](img603.png)